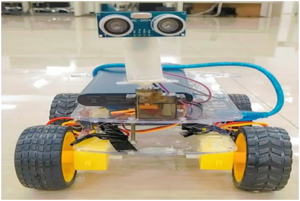
Project Description:
The obstacle avoiding automatic car, after the power supply is connected and switched on, starts moving forward until it detects an object in front of it, when it stops. It checks the distance to it’s right and left. Whichever is greater, it turns towards that direction and starts moving forward again. It repeats these steps until it completely moves out of the obstacle course.
Project Utility:
It helps to navigate through unknown environment without collisions. We can add Bluetooth modules and camera so that the user can see the detected obstacle from some other place. It can also be implemented in vehicles to help prevent road accidents which could save lives of many people.
Video link:
https://drive.google.com/file/d/1eE1xh_AFxiKMwuFPTzOVBDPJZixJvEU4/view?usp=sharing